
导读:最近我们试驾了蔚来的ET7,主要是想感受一下NOP。先说结论:总体来说体验非常好。之前没有购买小鹏的X Pilot,一方面还是比较保守,风险厌恶;另一方面对新技术处于观望的心态。但我们换下一辆车的时候,应该会购买辅助驾驶服务的。
一、蔚来自动驾驶初体验感受
在高清地图范围内,比如市区高架、高速, 是可以通过方向盘上的实体按键,一键打开领航辅助驾驶;超出高清地图范围,领航辅助会自动变为Pilot,同时系统也发出明确的提示音,提醒驾驶员需要更多地监管车辆。
领航辅助和Pilot,有点像贵妇化妆品和和平替。在使用上的区别在于:
●领航辅助可以设置好导航地点后,完全按导航路线自动行驶:自行变道、上下匝道;同时还能根据路况自行判断是否要超车,有时探出车头发现情况有变,还会一边自言自语说现在不适合超车,一边回到原来的道路。特别像个普通人在开车,萌萌哒。
总之在高清地图的加持下,领航辅助基本上可以不需要司机接管,自己完成驾驶路线。
●上面的功能,Pilot都没有,所以遇到需要拐弯等情况,得靠司机自己;地面路况,经常会有车道线无法识别的情况(比如十字路口),这时系统也会更多地提醒司机接管,或者干脆直接退出。
另外,就算地面路况特别好(车道线清楚、导航路线没问题等),但由于目前的Pilot还无法做到小学生都会的“红灯停、绿灯行”,所以在地面路段是无法放心地把车交给系统驾驶的。更别提路边还有形形色色两轮车和行人,所以,Pilot开车,有点像自己在监管系统,有点意思,但用久了会累。
●虽然大部分高架和高速都在高清地图的标记下,但是在高速等的隧道内等部分路段,系统会提醒此处没有领航辅助,转而自行开启Pilot;离开这样的路段之后,领航辅助又会恢复。
●遇到受不了领航辅助的时候——领航在高速上的驾驶策略是,如果前车已经在系统设置的限速下开(比如80的限速,已经开到86),即使右边的道很空旷,领航会一直跟车而不会主动超车——这时也可以主动接管车辆,接管完成后领航辅助会自动恢复。

▲图.NOP打开后,HUD上会显示一个小车,表示车由系统接管
二、关于NOP以及其他辅助驾驶的一些想法

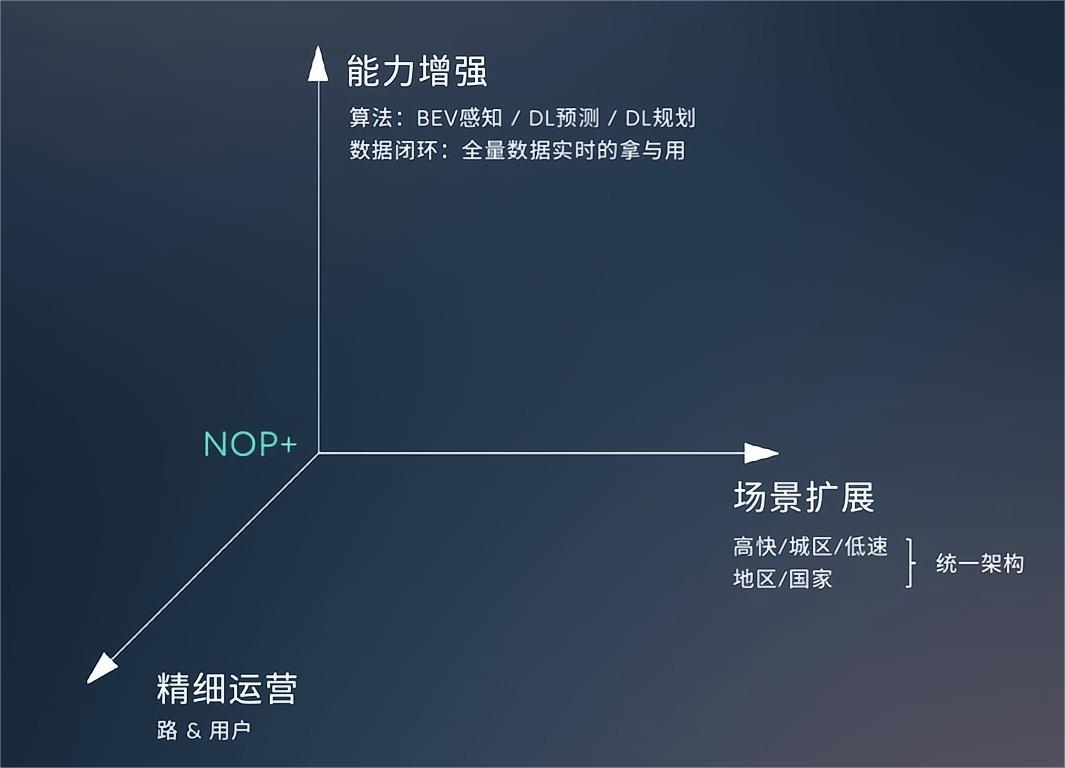
因为之前参加蔚来汽车的NOP Pilot Workshop,对这个产品的迭代也比较清楚。这套系统随着迭代可以分场景叙述:◎低速道路:从农村到G50的区域,采用Pilot的方式,感知围绕激光雷达,较低速度探索道路寻找可驾驶路径。◎高速道路:G50、G1503和S32大部份道路,基于高精度地图开发的领航辅助。◎匝道:这段主要在几个高速之间衔接道路,采用Pilot模式,没有高精度地图通过导航路径匹配,这段特别有学问。
◎维修和缺乏高精地图的高速道路:存在领航辅助驾驶和Pilot的切换。
实际体验下来:
◎低速道路:
青浦道路上就开始使用了Pilot功能,速度设置为45km/h,在青浦的农村乡村道路上使用Pilot功能,我比较担心的是红绿灯,其他感觉还好,因为有各种各样的农村三轮车和奇奇怪怪的车辆,在整个尝试过程中,就是不断通过前面的仪表屏幕来监视监视Pilot系统是否识别到前方各种物体,然后是否能显示出来。

◎高速领航辅助功能:
总体感觉领航辅助驾驶的策略就是逼近极速,看到大车和挂车也是一脚油门冲上去,不断提速。在G50朱家角路段,两车道的高速自己开起来是很难受的,因为超车或者变道,很容易不成功。但是总体来看,G50全程21公里系统基本都能开下来了,期间大概有3次试图超车,又会根据实际的情况放弃。特别是在两车道的高速道路上,如果有大车在前面的时候,整个驾驶体验会比较极限。总体来看,在部份道路上,如果交通流量大,规划控制的优化是车企需要花大力气的。

▲图.高速上是逼近极限的开法
◎高速领航和Pilot的切换:
从G50到G1503的匝道上走,系统从高速领航辅助切换到Pilot功能,使用45公里的限速来走。整体策略还是很成功的,在自动变道的时候,一般是驾驶员最为紧张的一个阶段,也确实通过盲点检测来判断是否有后方车辆来确认NOP的策略正确。如果NOP判断时机不对,也会屡次放弃变道决策,同时系统会语音提示。

G1503这一段20公里左右,还有部分隧道路段,由于高精地图缺失,高速领航辅助也会切换为Pilot功能。我第一次听到领航辅助要退出的时候,以为系统要撂挑子,结果是Pilot来接管了。所以人机交互的时候,可能需要更明确地给出一些预期,目前是真的需要个人接管和两种软件状态的切换下的提醒,提醒的内容还不是那么清楚,需要驾驶员更长的适应时间。
◎高速修路等极端情况,需要人为接管:
S32上大概有3公里是这种情况。在这个过程中主要担心的几个点:
带雪糕桶的道路上,其他车Cut in的预期会很频繁,而且可行驶的道路本来就减少了。
这一段系统会提示你需要随时接管,但是我也不清楚我什么时候接管,索性就自己来了。
最后还有一个小的风险:在一路领航的过程中,高速公路上出现了一个塑料脸盆,系统没“看到”——因为仪表盘的屏幕上没有显示,也没有减速。这个对于NOP确实比较难判断。

小结:NOP领航辅助和Pilot确在很大的程度上让司机在高速全程都可以依靠,随着算法和软件的迭代,确实能有很大的突破。总体体验下来,高级别的辅助驾驶在拥堵的高清地图路段特别有效,虽然并不能靠车技缩短拥堵时间,但是可以极大地缓解司机自己开车时候的烦躁心情,让司机从拥堵中跳脱出来。遇到拥堵路段,如果大家都用辅助驾驶系统开车,搞不好更能缓解整体的拥堵情况。
来源:汽车电子设计 作者:朱玉龙






