
导读:最近蔚来做了一份《NIO区域控制器架构与多控制器软件融合的思考》,这也是未来第一次在技术论坛上透露自己的下一代电子电气架构。蔚来汽车升级EEA架构主要的目的,是跟上目前智能汽车迭代的浪潮,实现软件复用、快速迭代、快速灵活部署、软件平台化、代码高内聚低耦合。
严格来看,大部分车辆的高智能化,是为了实现硬件系统平台具备能收取软件费用,不断把车辆硬件价格平台化,往价格往下走,但是可以让消费者选择是否购买增值的新软件。
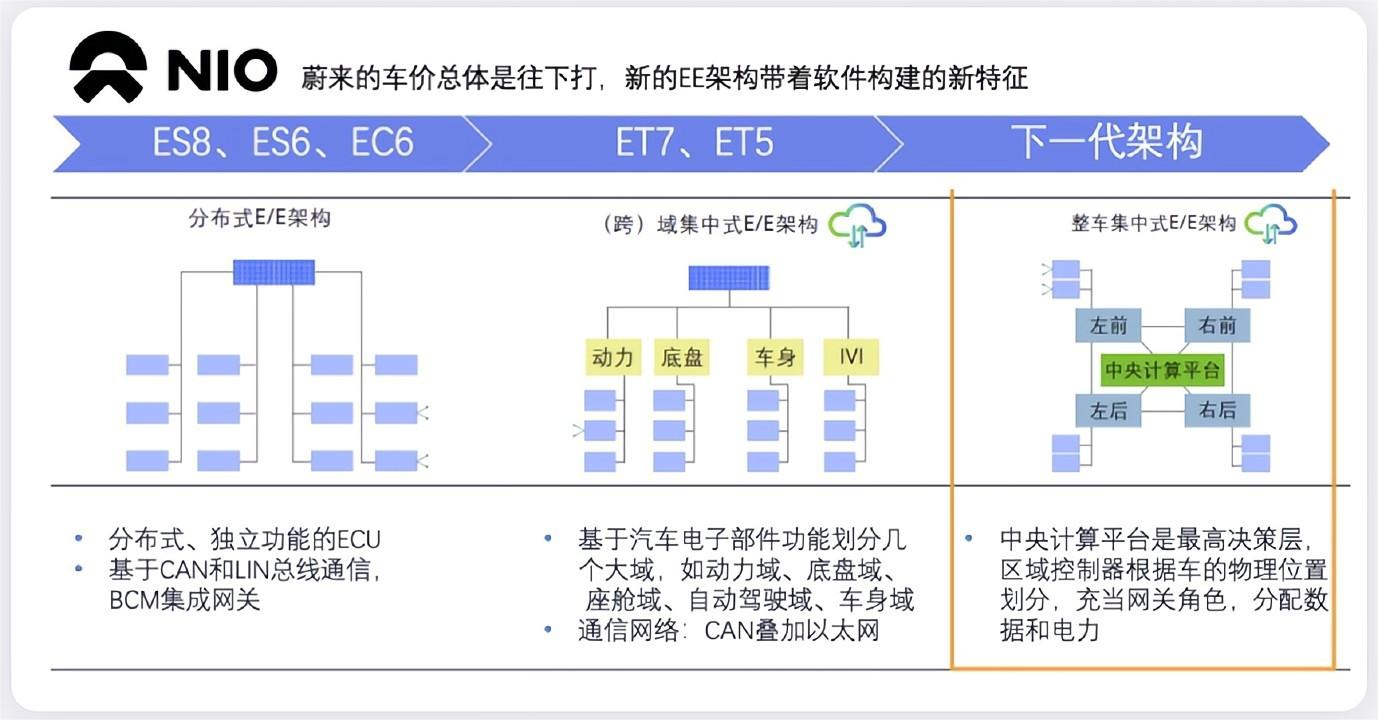
▲图1.蔚来汽车的总体架构
一、蔚来汽车规划中的下一代电子电气架构
与全球大部分整车企业一样,蔚来汽车的工程师的选择也是如出一辙的区域控制器架构,整个EEA系统由汽车中央计算单元、区域控制器,通过车载高速以太网进行连接,构建一套自适应和自学习系统,可以支持广泛的智能互联功能。
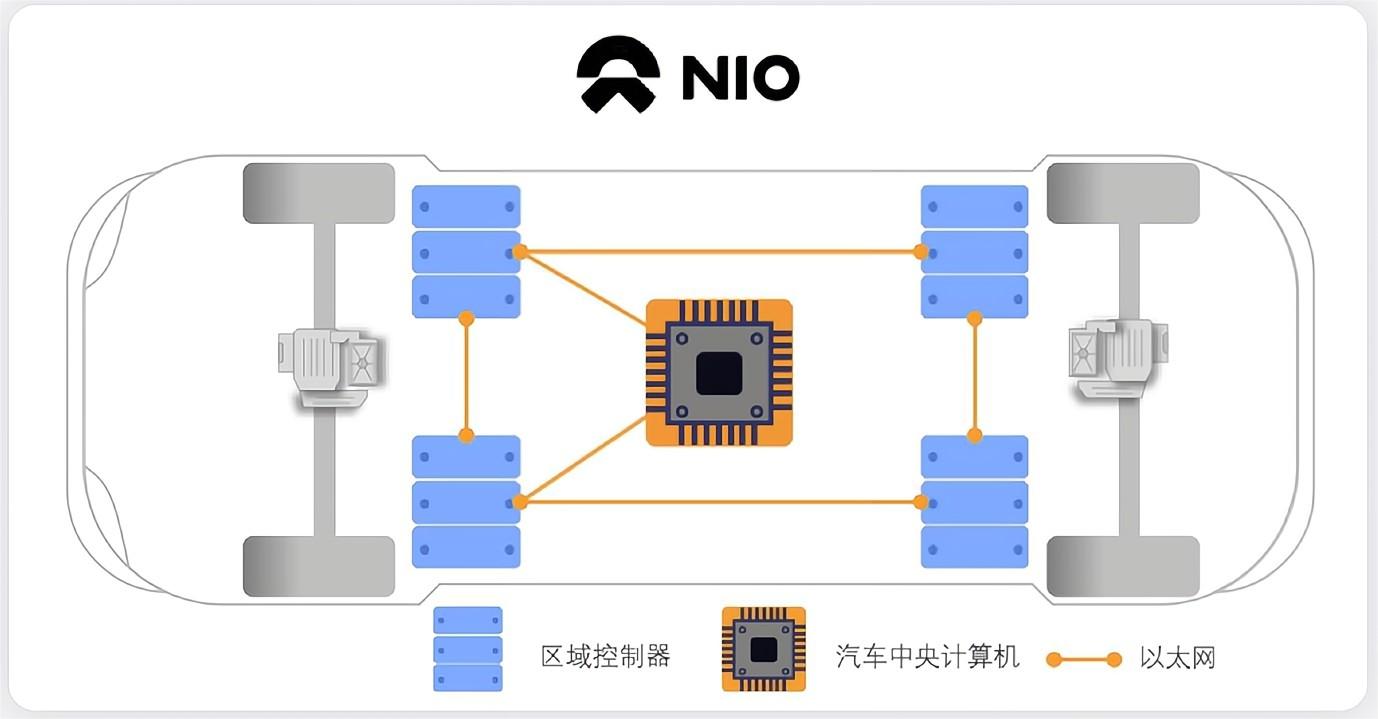
▲图2.蔚来汽车的下一代区域架构
这种EEA架构通过环形拓扑,可以支持Fail Operation的冗余系统,有着很好的扩展性。蔚来的中央计算单元在性能上拥有1000TOPS以上的算力,主频大于1GHz,这个给出的信息可能是现有的Adam的超算平台,主控是英伟达的Orin芯片。
备注:这下一代系统至少也得在2023年底,2024年初出来,是否可以过渡到下一代平台不清楚。
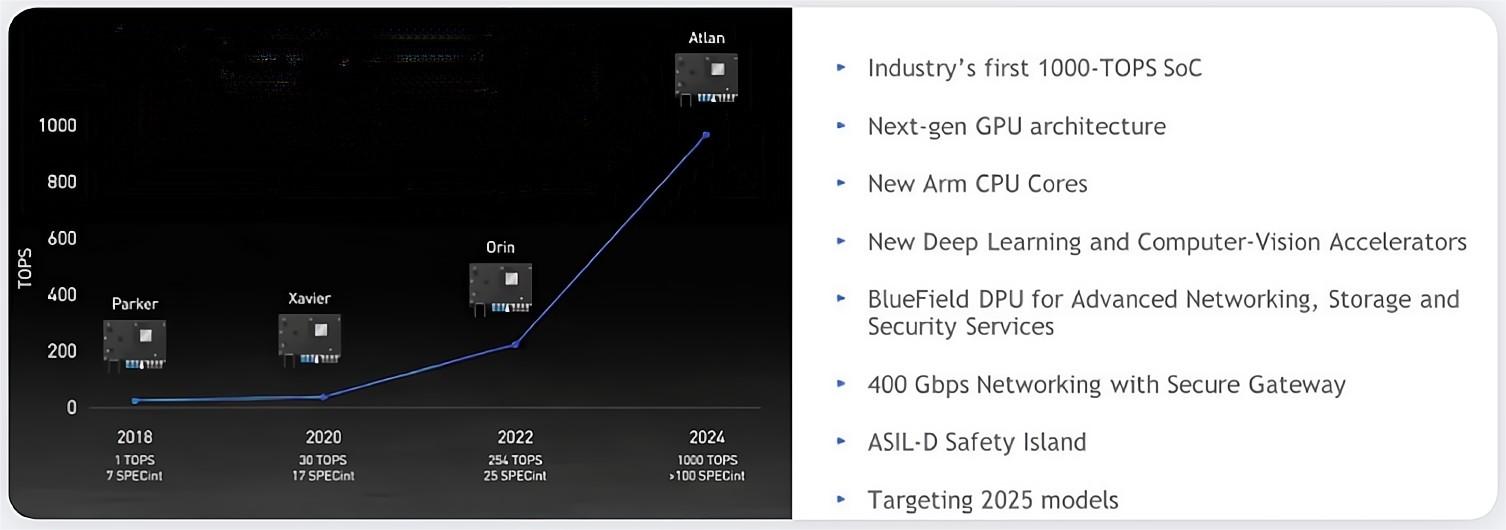
▲图3.英伟达的SoC芯片
目前蔚来的Aquila系统,主要聚焦于自动辅助驾驶,由四个DRIVE Orin系统级芯片(SoC)构成,具有超过1000 TOPS的算力,两个Orin芯片负责处理车辆传感器的感知数据和自动辅助驾驶决策,一个Orin作为备份,实现功能安全,还有一个Orin支持本地训练,通过车队学习来改进。到了Atlan平台,可能就整合座舱的系统了。
蔚来的区域控制器主要功能是:
●分布式边缘计算框架
●车控仲裁中心:实现不同优先级的服务判断,实现一定的信息安全处理
●面向SOA服务通信的信息通信网络
●区域集中式数据中心:通过以太网和CAN、LIN网络来分发数据
●整车配电枢纽:这里会有很多E-fuse来配合分电
●获取智能传感器的数据和控制智能执行器的行为
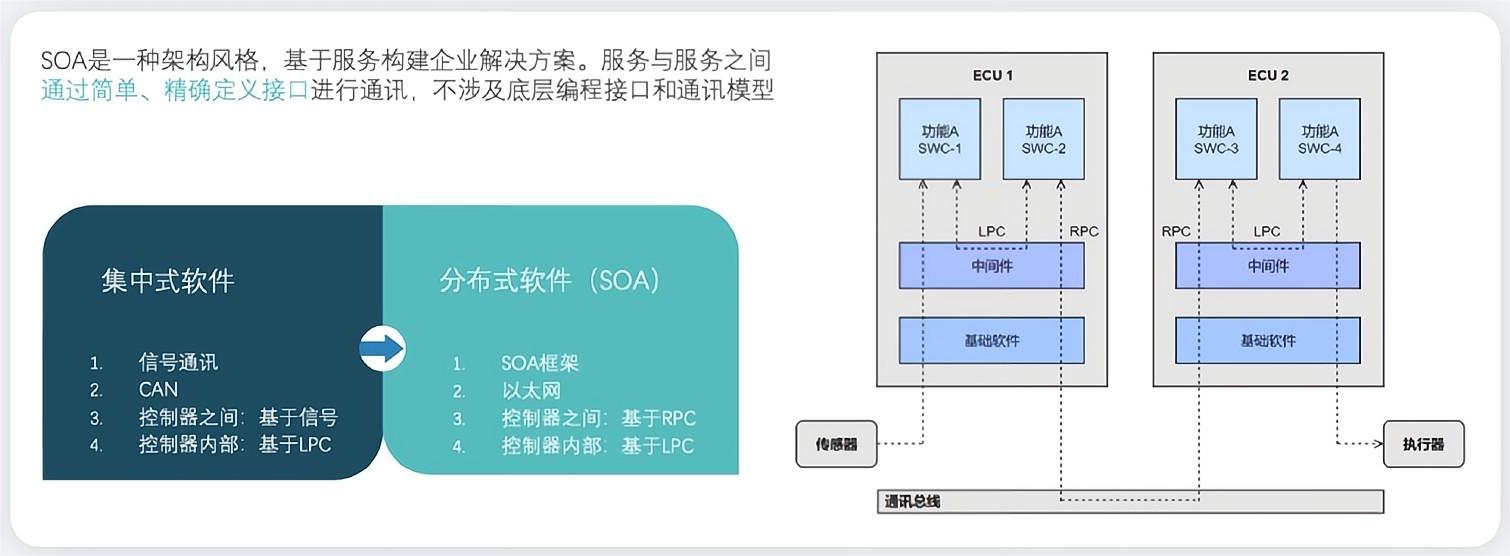
▲图4.SOA基本是个分界线
实现智能汽车的基础,是实现平台化、高内聚低耦合、高重用性、灵活部署的特性,汽车软件一定是面向服务的架构、广泛的采用中间件。汽车软件的开发调整,是对现有的软件架构进行重构,引入远程调用方式(RPC)。
二、区域控制器基础软件的挑战
实现跨域功能融合、跨域功能隔离,需要实现多核部署,对各种不同功能安全系统的功能进行隔离,比如转向、底盘、动力总成的扭矩控制等。
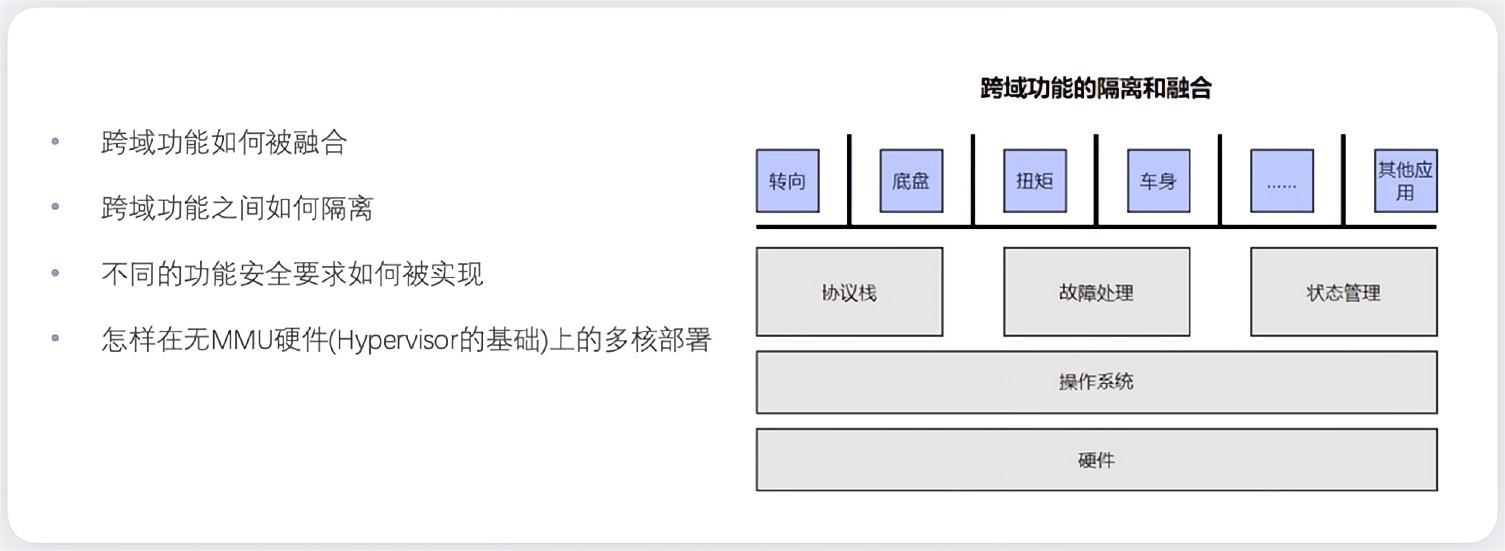
▲图5.汽车中央汽车平台带来的融合挑战
蔚来汽车在区域控制器上采用AMP多核架构,AMP模式的RTOS在各个CPU上均运行一个操作系统。
●优点:不需要MMU、运行开销小,支持裸机系统、硬件资源静态分配、支持异构和不同功能安全等级的系统融合。
●挑战:多核任务的负载均衡、稳定的多核通信机制、启动顺序带来的同步和安全问题,更复杂的功能安全考虑等。
这套架构还需要一个产品周期来迭代和试验,我们也可以对比小鹏的G9的软件和架构的完成度。
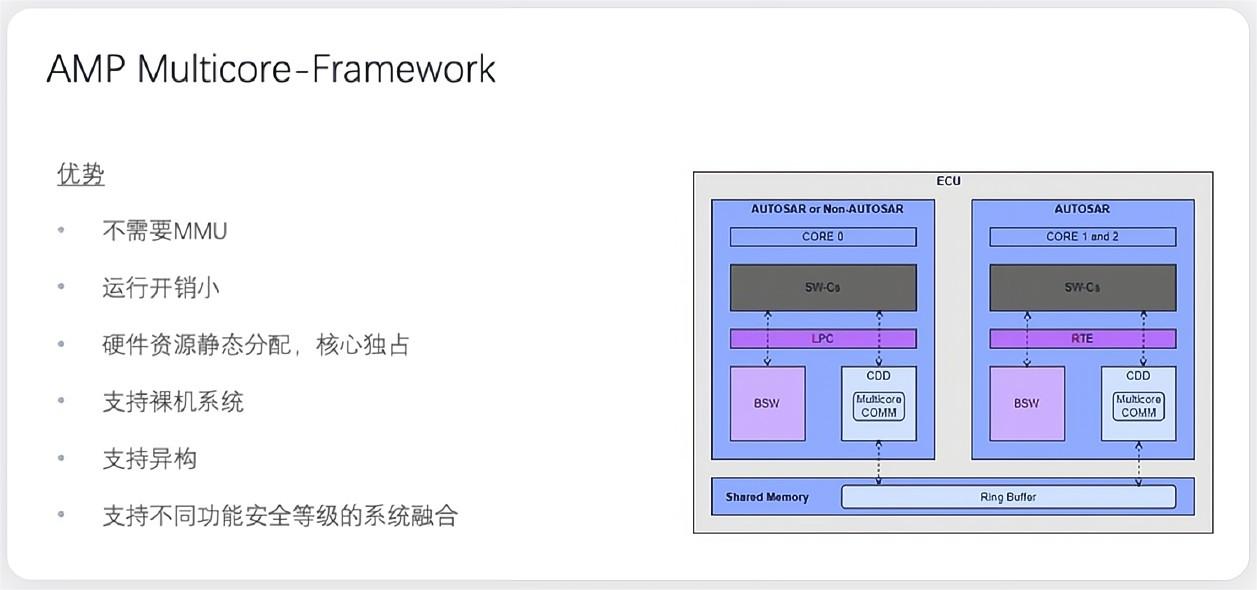
▲图6.蔚来汽车使用的AMP模式
小结:2023年是新势力车企和传统主机厂导入新型EEA架构和SOA的时间节点,先进架构到底能否以成熟的软件来支撑,这是目前最大的挑战。
来源:汽车电子设计 朱玉龙
相关阅读:






