
导读:最近特斯拉在汽车圈又刷了一波流量,例如新闻标题“一辆特斯拉赚十万””利润暴涨658%“等。其实这背后信息是特斯拉发布了2022 年第一季度,特斯拉总收入达 187.6 亿美元,同比增长 81%。毛利率为 29.1%,营业利润率为 19.2%,均创下有史以来新高,羡慕嫉妒啊。
本着Vehicle不做吃瓜群众的精神,所以也去查看了下,到底特斯拉为啥现在这么盈利?正好看到一篇system Plus consulting的分析介绍特斯拉自动驾驶系统零部件的文章。而作为智能汽车,自动驾驶的传感器以及域控制器不言而喻占用成本非常高,例如我们之前文章从2022 CES 看Mobileye 自动驾驶产品技术以及战略(谁说算力是唯一标准)中透露其目标在2025年把自动驾驶全套成本降到3万元之内,那么你想想现在成本是多少?就拿蔚来汽车40万左右的定价,假如算BOM成本为一半20万,就按五年后的价格来算也就是至少15%的成本。也想而知智能汽车中智能驾驶硬件的成本多高。
所以本位正好借用System Plus Consulting特斯拉自动驾驶系统零部件分析文章从特斯拉自动驾驶传感器以及芯片看其高利润秘诀,或许能给我们一些思考。
特斯拉本质上是基于视觉主导不带激光雷以及高精地图的纯视觉AI自动驾驶方案。
所以其Model 3 的自动驾驶物理硬件主要为:
1、传感器
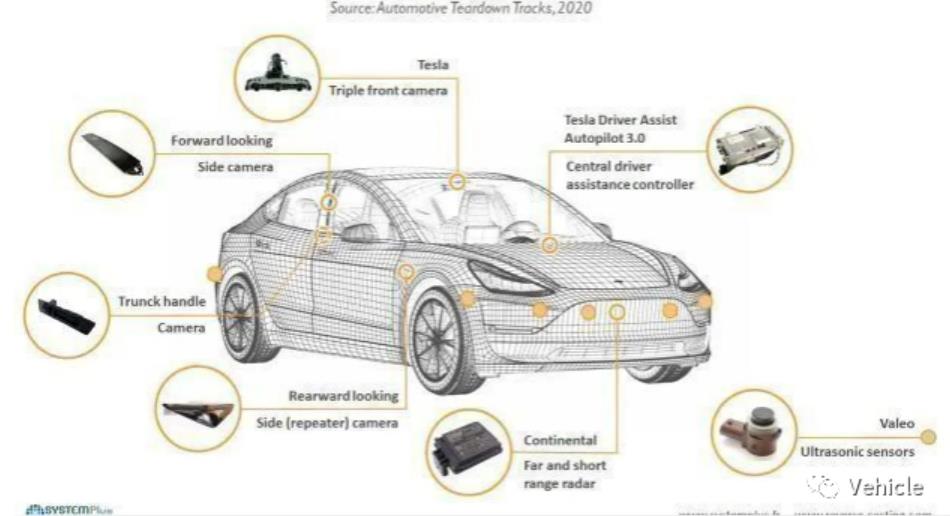
8 个摄像头、1 个雷达和 12 个超声波传感器。

- 8 个摄像头,可在 250 米半径内提供 360 度全方位视野。前视觉三摄覆盖 250 米,但视角非常窄,中距离150 米,另外一个前视是宽视觉鱼眼 60米,侧面前视2个摄像头分别为80米,组成可以看到汽车周围的环境,以及路标。其他3个摄像头面向汽车的侧面和后部,可以看到最远 100 米的距离。
- 12 个超声波传感器,检测汽车周围 8 米半径内的障碍物。它可以在任何速度下工作,还可以控制盲点。Autopilot 也使用声纳收集的数据来管理超车期间的自动变道。
- 1个前向毫米波雷达系统,最大探测距离160米,它以冗余波长提供有关周围环境的额外数据,可以穿透大雨、雾、灰尘,甚至超越前车。
- 1个GPS用来定位
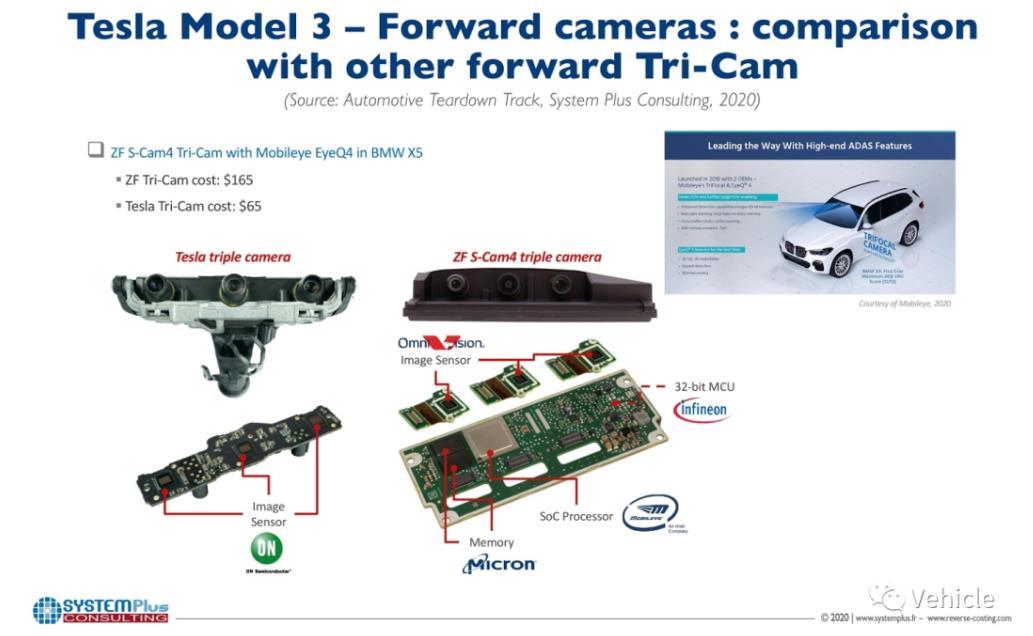
对于其前面的三摄摄像头的设计,特斯拉将所有 CMOS 传感器嵌入 PCB 板中,无需处理 SoC。而当前其他三摄摄像头例如宝马最新7系采用采埃孚S-Cam4采用 Omnivision CMOS 图像传感器和 Mobileye'a EyeQ4 视觉处理器。所以system Plus估计采埃孚三摄的成本为 165 美元,而特斯拉的三摄为 65 美元,特斯拉价格都快只有其1/3。超声波雷达就不讲了,听说这个玩意儿价格太低,好像是20元人民币以内的成本。
毫米波雷达,特斯拉采用的是大陆集团成熟的雷达模块ARS4-B 内部是 NXP恩智浦提供的 77GHz 雷达芯片组和 32 位 MCU。用于前向碰撞警告、紧急制动辅助、碰撞缓解或自适应巡航控制 (ACC)。一个重要的元素是同时测量长距离(最长 250m,精度为 +/-0.2m)和短距离(最长 70m)、相对速度和两个物体之间的角度。
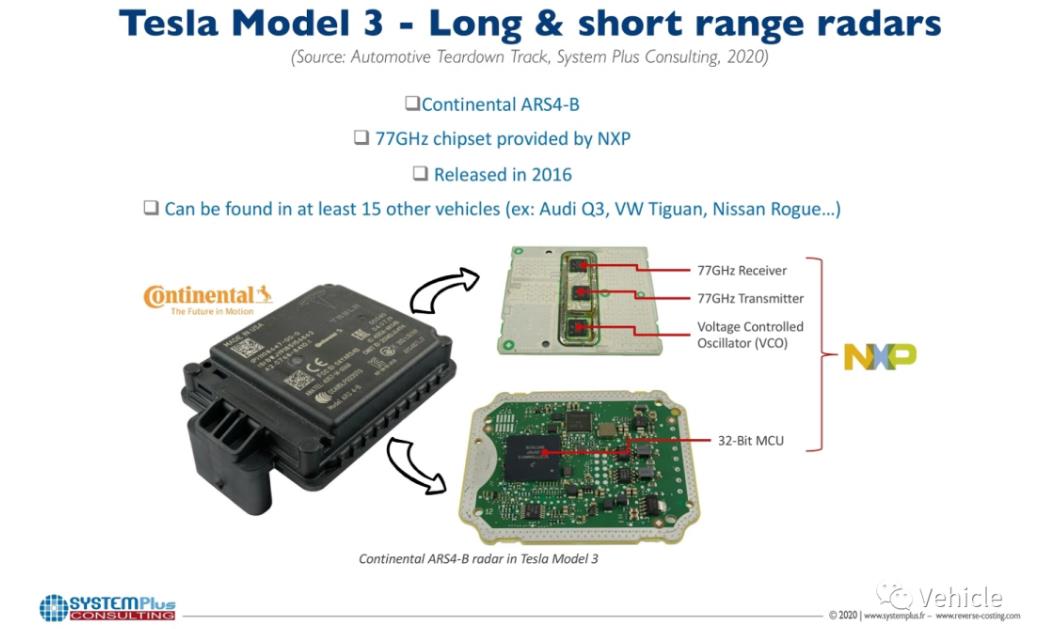
该系统由两个电子板组成,其中包括一个 NXP Semiconductor 微控制器和一个 Broadcom 以太网收发器。射频 (RF) 板采用不对称结构制成,具有 PTFE/FR4 混合基板,配备平面天线。NXP 恩智浦的 77 GHz 多通道雷达收发器芯片组由四个接收器、两个发射器和一个相关的压控振荡器 (VCO) 组成,用作高频发射器和接收器。System Plus 指出,尽管包括联发科和德州仪器在内的几家芯片公司声称进入汽车雷达市场,但恩智浦和英飞凌是无可争议的两大巨头。大陆是雷达模块供应商中的主要参与者。它的 ARS4-B “至少可以在 15 种其他车辆中找到,包括 Audio Q3、大众途观、日产 Rogue 等,”
2、域控制器
特斯拉开发了一个定制的“液冷双计算平台”,包含智能驾驶以及智能座舱两部分,但他们不是在同一块PCB版上,也就是只是把他们放在一个盒子里面。
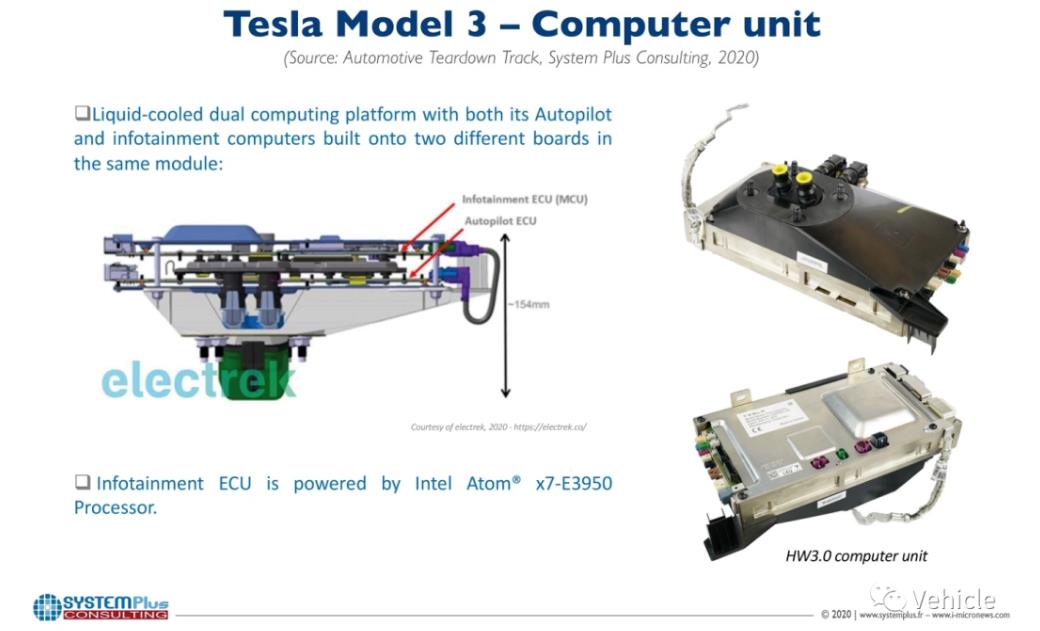
熟悉我们文章的知道,特斯拉最开始的智能驾驶用的mobileye方案,也就是硬件软件都是别人的,在 HW2.5 中,特斯拉整合了两个 Nvidia Parker SoC、一个 Nvidia Pascal GPU 和一个 Infineon TriCore CPU。而现在HW3.0,Tesla 集成了两个新设计的 Tesla SoC、两个 GPU、两个神经网络处理器和一个锁步 CPU。
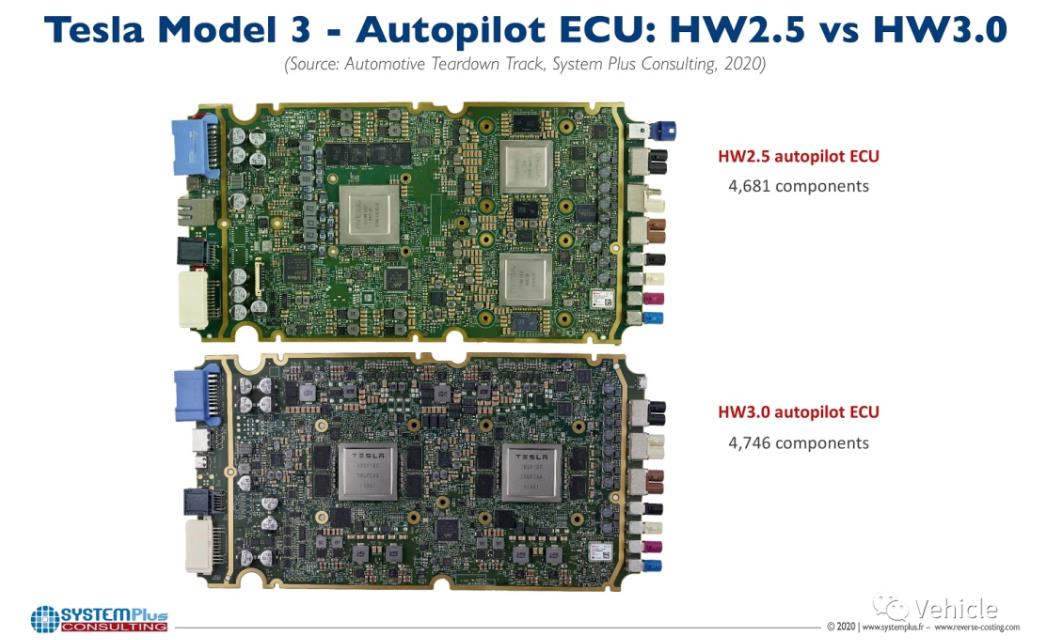
Tesla SoC 在 HW3 中使用的技术节点是 14nm,而 Nvidia 的 HW2.5 处理器中使用的是 16nm。处理器数量从四个 Tesla SoC 减少到两个。
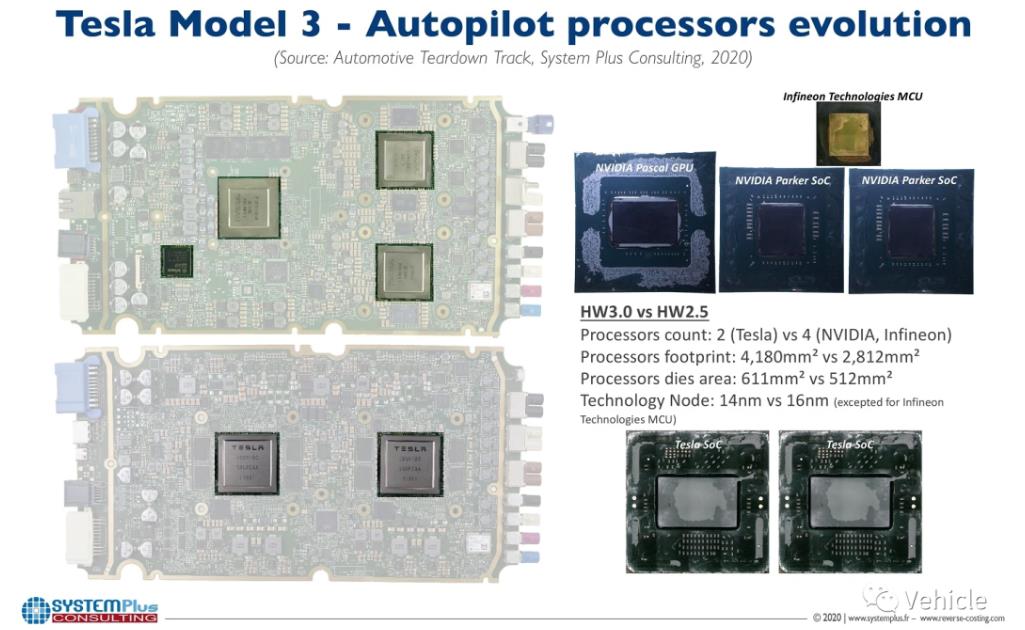
System Plus 通过测算,特斯拉的 HW2.5 由三个英伟达的芯片和英飞凌 MCU 组成,售价为 280 美元。相比之下,基于特斯拉两款 SoC 的特斯拉 HW3.0 售价 190 美元。,HW3.0比HW2.5 主要的处理芯片就省了90美金一块。
当然设计芯片也不是不要花钱,System Plus假设一家汽车制造商在自己的处理器上花费 1.5 亿美元用于设计成本,而组件价格没有变化且年产量为 400,000 台,汽车公司可以在四年内收回投资。显然看特斯拉现在的销量不要四年就收回成本。其实芯片设计GPU时代按照Nvidia英伟达的 AI 智能汽车信仰中其实大家更多的是采用ARM架构,是不是也有路径,另外国内在一图概览2022 电动汽车百人会论坛观点过中地平线不是也可以支持大家一起做。
总结
所以从特斯拉的自动驾驶硬件系统来看,确实控制成本高手,当然他还保持较高的客户体验。
那么我总结下其秘诀:
总体上要有设计思维,最优的成本精准满足客户需求,不过度设计和过度工程。这个说起来容易,做起来难,视野上要保持前瞻,技术上要保持可拓展敏捷。
电子零部件简化以及批量模块化,例如摄像头COMS图像传感器子零部件模块通用化,这个其实和#整车架构模块化原理相同,所以电子子零部件模块化在智能汽车时代估计也是一个课题。再如其摄像头并不自我处理而是直接发送到域控制器统一处理。
核心关键芯片自研,作为一家依赖智能电子的汽车主机厂,核心芯片在强势供应商手上可不是一件很划得来的事情,特别出现只有一两家独大的时候。类似于现在英伟达可能各大主机厂在他面前议价能力估计很弱。
那么看完时候想想,我们的新势力更多的是在堆料,拼参数,国人还是有一段路要走,加油。
参考文章:
特斯拉自动驾驶硬件拆解 - Junko yoshida EE times
作者:Vehicle Pirate Jack






