导语:电动化、智能化、网联化和共享化是汽车产业公认的未来发展方向。作为电动汽车核心零部件,整车控制器必须能够支撑汽车“四化”。其必须满足高计算性能、高通信带宽、高功能安全性、软件持续更新等需求。目前整车电子电气架构及整车控制器所搭载技术普遍无法满足以上需求。为覆盖上述需求,未来汽车产品将逐渐采用集中式电子电气架构,同时整车控制器必须包含以太网、CANFD、多核芯片、双核心、OTA等关键技术。
本文将首先介绍整车控制器与分布式和集中式2种电子电气架构的关系,然后分别介绍了新型整车控制器的关键技术,对技术内容进行了分析,提出了未来发展趋势并进行了展望。
1. 整车控制器与电子电气架构
1.1 整车控制器与分布式电子电气架构
在以往的芯片能力前提下,受到计算能力及通信能力的限制,整车控制器无法集成所有的车辆控制软件,即使是新能源部件控制相关的软件也无法全部集成。这决定了整车控制器只能作为分布式电子电气架构中的一员,但是这种关系限制了功能变更及扩展。
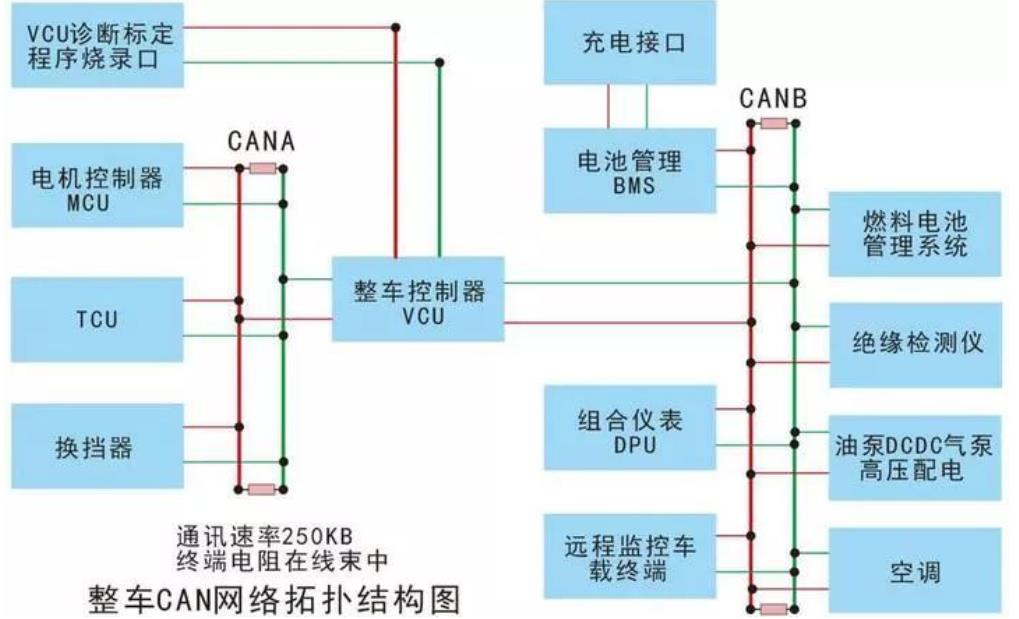
在分布式电子电气架构中,一项整车层级的功能由多个控制器配合完成。某项功能的实现可能需要几个或十几个控制器相互配合,并且这些控制器可能分布在整车不同的网络中(图1)。
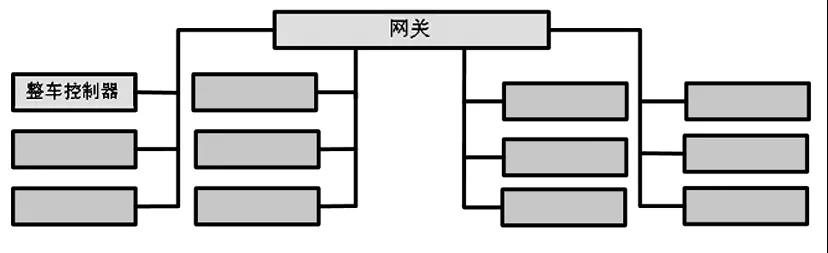
图1 整车控制器在分布式电子电气架构中的位置
整个交互过程与时间配合异常复杂。整车普遍有100余个控制器,几百项整车级功能,功能与控制器本身的物理连接交织成一个巨大而复杂的网,非常不利于模块化设计与扩展。在这种情况下,增加一个新功能,需要在上述的复杂功能网络上考虑各部分相关性,并对大量的控制器软件进行修改及测试。
1.2 整车控制器与集中式电子电气架构
随着芯片及车载以太网的发展,整车控制器已经具备集成大部分车辆控制软件的能力。分布式电子电气架构正在逐渐向高度集成化和智能化发展,整车控制器在电子电气架构中的位置也随之发生变化,真正实现车辆层级的集成型控制器,其控制涵盖动力、底盘以及一些网关功能。整车控制器与集中式电子电气架构的关系如图2所示。将大部分的功能集成于整车控制器中会极大地减少整车线束长度与控制器数量。

图2 整车控制器在集中式电子电气架构中的位置
2. 新型整车控制器关键技术
为支撑汽车“四化”,整车控制器必须满足高通信带宽、高计算性能、高功能安全性、软件持续更新等多项需求。其中,高通信带宽催生了车载以太网、CANFD技术发展;高计算性能催生了多核芯片和双核心控制架构技术发展;软件持续更新催生了OTA技术发展。这些技术将被普遍应用在新型整车控制器上。下面将分别介绍这些技术。
2.1 车载以太网
在过去20年里通信带宽问题一直困扰着汽车行业。在这期间,CAN总线是主流的车载网络技术。其1 Mbit/s的标称速度在该技术早期对于汽车带宽需求有足够的裕度。然而近年来随着车辆控制逻辑越来越复杂,所需控制器和传感器数量急剧增加,虽然集中式电子电气架构可以在一定程度上减少控制器数量,但是由于域控制器的计算能力远高于原有车辆控制器,因此1 Mbit/s的CAN通信带宽显然是无法满足数据交互需求的。
更高的通信带宽要求加速了以太网和汽车行业的融合。以太网诞生于20世纪70年代,其最早的雏形与如今家庭、办公、服务器机房、数据仓库运行的以太网早已截然不同。尽管以太网与时俱进地发展,但是应用于汽车仍有一些问题,最主要的是电磁兼容性问题。这些限制在 BroadR-Reach 技术出现后被打破,该技术可在单对非屏蔽双绞线上提供 100 Mbit/s的带宽。这种传输方法从未应用在之前的以太网。即便物理层变化,这种技术仍能够在高层实现与以太网的无缝结合且运行方式不变。目前,该技术已经用于量产车型。同时,支持更快速度的 RTPGE 技术正在研发中,在保留软件兼容性的同时,其带宽有望提升到1 Gbit/s。
尽管通信带宽有着明显的优势,但受制于成本及功耗因素,车载以太网主要应用于骨干网络。用于整车控制器与其他域控制器的通信,如图3。而对于域内的智能执行器和传感器,使用其他低成本解决方案,如CANFD、CAN、LIN。
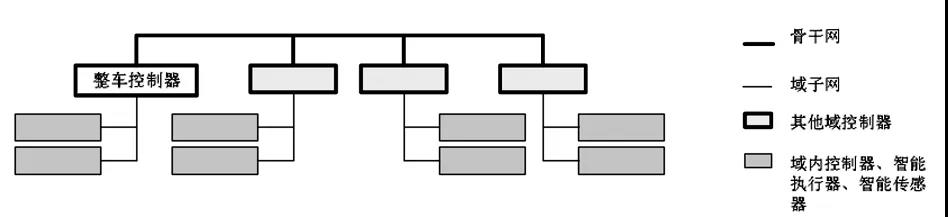
图3 整车控制器使用以太网与其他域控制器通信
当然,在整车控制器上增加车载以太网面临着巨大的改变:相对于CAN通信更庞大的软件协议栈;更大的控制器功耗;更大的静态电流,这些都需要在系统设计时被考虑。
2.2 CANFD
考虑到成本及功耗,整车上只有骨干网使用高通信带宽的以太网通信。但是对于其他子网,标称 1Mbit/s 的 CAN 通信也迫切的需要提升通信速度。目前成熟的CANFD技术是一个好的解决方案。
CANFD总线是CAN总线的高带宽解决方案,博世公司于2011年首先提出CANFD概念,并于2012年首先发布 CANFD1.0 版本。在保留 CAN 总线主要特性的同时,改善了错误帧漏检率,同时保证网络中大部分软硬件特别是物理层不变。将总线的最高传输速率提高到5 Mbit/s 以上(CAN 通信的最高传输速率为1 Mbit/s,实际使用速率最高为500 kbit/s)。
更重要的是,CANFD数据长度最长64字节,这使得CANFD的数据场占比达到近85%。CAN的数据场占比只有约 50%。这意味着即使同样的通信带宽,CANFD可以多传输约70%的有效数据。CANFD帧格式如图4所示。

图4 CANFD帧格式
更为关键的是,由于 CANFD 保留了 CAN 的大部分关键特性,所有的 CANFD 芯片都能够兼容 CAN。这使得选择CANFD芯片的控制器在不改变硬件的情况下,只修改软件即可适配 CAN 通信网络。CANFD技术有多重优势,在未来相当长一段时间内,车载以太网与CANFD将会长期共存,各司其职,共同发展。
2.3 多核芯片
同传统消费电子领域早期一样,为了获得更快的处理速度,汽车行业采用提升核心频率的方式来提升处理速度。但为了兼顾稳定性,核心频率提升遇到瓶颈,未来小幅的提升核心频率已经不能满足日益增长的软件执行速度需求。这种情况下,汽车行业选择了与消费电子一样的技术路线,采用多核芯片。
多核芯片大幅提升了芯片的运算能力。这是一种并行的方法。所以在应用中想获得同样的效果,需要在软件设计时合理地将各部分软件分配到各个核心中。原则是尽量让所有软件并行。多核芯片的算力与同频率单核芯片的算力加速比可以使用Amdahl定律来评估。公式如式(1):
S=1/(1-a+a/n) (1)
其中,S为多核芯片的算力与同频率单核芯片的算力加速比;a为并行计算部分所占的比例;n为核心数量。
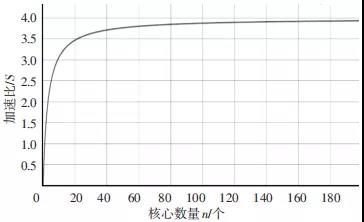
图5 并行程序占75%时,加速比S与核心数量n之间的关系
如图5,当并行程序为75%时,加速比的极限性能为4.0。在10核以内增加核心数都可以大幅提升运算性能。前期可以通过此方式对系统运算能力和分配要求做大略的评估,寻找一个最佳投入产出点。同时这个公式还指出,对于一个核心数量固定的多核系统,增加程序并行性是提升系统运算性能的有效措施。
2.4 双核心控制架构
在过去的几十年里,汽车电子行业一直采用微控制器(MCU)搭建各种类型的车载控制系统。尽管不同厂家的微控制器性能各异,但他们都有一些通用的特点:集成度高、价格低廉、高可靠性、核心频率低、程序是预先装载的以及不允许用户安装软件。软件定义汽车的出现,要求整车控制器具备高计算性能、程序可更新、客户可安装软件等特性,在整车控制器上微控制器便不能再独自胜任。
目前主流的解决方案是引入微处理器(MPU)作为微控制器的补充。组成双核心高性能整车控制器。这些微处理器与智能手机或PC中使用的微处理器非常相似,具有强大的计算及数据处理能力和高核心频率。但其并不像微控制器具有种类繁多的外设,甚至连程序运行所必须的RAM、ROM都不包含,所以硬件设计时必要的外设需要被重新考虑。
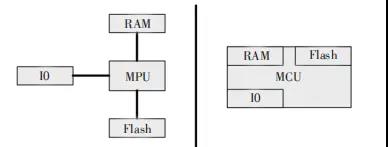
图6 微控制器(MCU)与微处理器(MPU)集成度差别
整车控制器中同时包含了微处理器与微控制器(图6)。由于这是2个独立的软件系统去实现一些共同的功能,核间通信必不可少。核间通信有大量数据量传输,对通信带宽要求较高,且通信方式必须同时被微控制器和微处理器所支持。满足上述特点的以太网是一个优质选择。
双核心控制架构还有一种形式,高集成度的SOC(System on Chip)芯片同时集成微控制器和微处理器。尽管物理上统一,但这仍然是2个独立的软件系统,需要相互配合去实现一些共同的功能。
在双核心架构的整车控制器中,微控制器和微处理器采用不同的操作系统。CLASSIC AUTOSAR依然是微控制器最好的操作系统解决方案。而对于微处理器,操作系统选择空间很大,主要包括Linux、QNX、VxWorks、PikeOS。虽 然 AUTOSAR 推 出 了 ADAP⁃TIVE AUTOSAR,但严格来讲,这并不是一个完整的操作系统。ADAPIVE AUTOSAR无法独立运行,它运行于 POSIX 标准接口之上。而 POSIX 接口还需要上述提到的Linux、QNX、VxWorks、PikeOS等操作系统来提供。同 CLASSIC AUTOSAR 相比,ADAPTIVE AU⁃TOSAR的模块数量不足前者15%。从目前情况看,若想达到 CLASSIC AUTOSAR 在汽车行业的普及率,ADAPTIVE AUTOSAR依然有很多路要走。
2.5 OTA
在过去的几十年里,汽车电子产品所有的软件都是预先装载的。车辆交付给客户后,没有不可接受的软件问题,一般不会对车辆软件进行更新;一旦发现软件问题,要进行车辆召回。统一由售后服务人员逐一为有问题的车辆升级软件。对售后部门来说,这是一笔非常庞大的开销。据统计2015年美国汽车召回达到8400万量,其中6.4%的召回与软件有关。而空中升级技术(Over-the-Air Technology,OTA)可以解决上述问题。
OTA 技术,最早用于手机端,用户可以通过云端下载和更新软件。带有OTA的汽车也同样可以通过云端远程进行车辆系统和功能的升级更新。特斯拉首先将OTA技术应用于汽车上。
OTA技术需要云端和车内端系统同时部署,OTA架构如图7。主要介绍整车控制器支撑OTA需要实现哪些功能。在经过授权情况下,软件从云端经 OTAClient 进入车内端。经过防火墙,分发到需要升级的控制器。
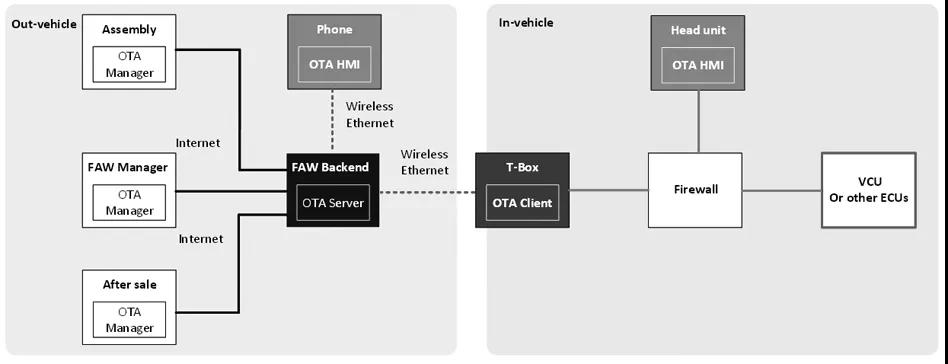
图7 OTA系统方案
OTA 是一个复杂的过程,为了避免出现问题,下述问题在整车控制器设计时必须被考虑。
(1)需要支持程序回滚,在OTA升级失败或新程序运行不稳定的情况下,使程序回滚到稳定运行版本;
(2)需要考虑信息安全,通过通信加密、软件包验签等方式保证软件信息安全;
(3)需要对车辆配置进行识别并对OTA能否开始条件进行判断;
(4)需要考虑软件OTA升级通信速率问题,避免出现由于升级时间过长,影响用户用车的情况。
3. 结语
综上所述,为支撑汽车实现电动化、智能化、网联化和共享化,作为电动汽车核心零部件的整车控制器必须具备高计算性能、高通信带宽、高功能安全性、软件持续更新的特点。本文首先介绍了在这些新特点下整车控制器与电子电气架构之间的关系。然后,结合相关成熟技术,阐述新型整车控制器将配备车载以太网、CANFD、多核芯片、双核心控制和 OTA 关键技术。最后,对上述技术进行了介绍,分析了在整车控制器上应用涉及的相关特性。其中很多特性并不局限于整车控制器,对其他控制器也有借鉴意义。
来源:汽车文摘