
导读:随着半导体技术和智能化技术的发展演进,越来越多的新技术在汽车领域得到了推广,汽车电器成本在整车成本中所占比重也在不断增长,实现车载控制器间数据交互的网络带宽也日益增长,CAN、FlexRay 等传统汽车网络带宽极限很难满足新一代汽车的发展需求。此外,伴随着车辆网联化、智能化的推进,云和大数据的运用,以及自动驾驶技术的发展,基于新的汽车网络技术,构筑新的汽车网络架构已经成为开发新一代高性能、高可靠性汽车的必然基础。
1 汽车网络技术发展
1.1 典型汽车网络技术
现今汽车普及的网络技术主要有 CAN、FlexRay、LIN、MOST 和 LVDS 等。以上通讯协议主要是由汽车行业联盟组织发起后推广的,承载着深厚的汽车工业色彩。
CAN 是使用最为广泛的汽车通讯技术,可用于各类控制指令、交互数据的传输,传输带宽可达 1Mbps。FlexRay 技术带宽可达 20Mbps,可支持多种拓扑形式,但成本相对较高,主要运用在中高端车线控系统,如线控转向、线控换挡和制动器控制等。LIN 是一种低成本汽车通用串行总线,最大传输速度约 20kbps,适用于对网络的带宽、性能或容错功能没有过高要求的应用,如车门、车窗和后视镜的控制等。MOST 总线主要运用场景是多媒体流数据传输,以 MOST150 为例,其最大传输带宽可达 150Mbps,但因为供应链体系相对单一,开发成本高,主要用户中高端车载影音系统。LVDS 一种基于电气数字信号的通讯技术,对线束要求较高,通常采用铜缆或双绞线作为高速数据的传输介质,主要用于数字视频传输,如全景系统屏幕和摄像头间的图像数据传输。
1.2 汽车以太网技术
如图 1,2010 年博通(Broadcom)公司提出的 BroadR- Reach 技术。该技术可实现以单对非屏蔽双绞线为传输介质的汽车以太网通讯,在提供 100Mbps 及更高的带宽性能的同时可满足汽车电磁兼容要求。此外,汽车以太网技术能有效降低网络复杂性和线缆成本,线束约可减重 30%。

图 1 BroadR-Reach 技术示意图
2 汽车以太网技术现状分析
2.1 汽车以太网技术联盟
目前推动汽车以太网技术应用与发展的组织包括:OPEN Alliance(One-Pair Ether-Net Alliance SIG)联盟,主要致力于汽车以太网推广与使用,该联盟通过推进 BroadR- Reach 单对非屏蔽双绞线以太网传输技术的标准化和汽车以太网标准的完善逐步实现汽车以太网技术标准的开放系统的创建。IEEE(Institute of Electrical and Electronics Engineers) 电气和电子工程师协会则根据汽车行业需求,对汽车以太网的物理层和上层通信协议进行标准化,其中,IEEE 802.3 主要负责定义传输物理层的标准,IEEE 802.1 则主要负责定义二层数据链路中的标准。AVNu 联盟关注的是汽车以太网上层协议,该联盟是一个旨在创建了一个可互操作的生态系统的社区,通过认证使用开放标准来满足不同应用程序的精确计时和低延迟通讯需求。AUTOSAR(Automotive Open System Architecture)即汽车电子软件标准的联盟,从 AUTO-SAR 4.0 版本开始包含汽车以太网相关内容,主要为 DoIP 协议,新版本中已经支持车载 Ethernet AVB 以及 SOME/IP 协议。
2.2 汽车以太网技术优势
2.2.1 低成本下的高带宽
智能网联汽车浪潮下,自动驾驶系统、智能座舱系统和车辆大数据采集等引发了车辆对总线带宽需求的爆发式增长。新一代汽车需要的是扩展性强、高带宽,且易于与其他控制器或系统交互的车载网络技术,同时有利于减少功耗、线束重量和成本。对于上述需求汽车以太网技术是一种很有优势的解决方案,以 BroadR-Reach 技术为例,能在够提供100Mbps 及更高的宽带性能同时实现 30%的线束减重、80% 通信连接成本降低。
2.2.2 支持多应用场景的协议镞
典型车载网络技术支持的通信协议相对单一,而车载以太网技术可同时提供包括 TCP/IP、AVB、SOME/IP、DOIP 等多种协议镞。作为传统以太网功能的扩展,AVB 基于新增的精准时钟同步、流预留、队列控制等协议,可提升传统以太网音视频传输的实时性,是极具发展潜力的网络音视频实时传输技术。车载时间敏感网络(TSN,Time-Sensitive Networking)是 AVB 的进一步拓展,TSN 引入时间触发式以太网的理念,能满足汽车控制类数据的传输的超低时延要求,可用于自动驾驶数据、车辆控制指令传输等高实时性要求场景。SOME/IP(Scalable Service-Oriented MiddlewarE on IP)则定义了面向服务的通信传输方法,与传统 CAN/LIN 等总线面向信号的通信方式有显著的差别,是新一代面向服务汽车网络架构(SOA)的关键通讯技术。此外,1Gbit 速率通信标准的高速汽车以太网将实现 POE(Power Over Ether-net)功能和高效节能以太网(EEE,Energy-Efficient Ethernet)功能,POE 功能可在双绞线发送数据的同时为网络的终端设备提供电源,省去终端外接供电,降低了线束复杂度。
2.2.3 无线功能
无线网络 WiFi 技术的发展是最能体现以太网是如何适应新需求的、发掘新潜力的事例之一。类似于 BroadR-Reach, WiFi 技术也有面向汽车工业领域的变种,即汽车无线存取技术(WAVE);在通信规范 IEEE802.11p 中对 WAVE 进行了详细描述,IEEE802.11-2012 中也纳入了相关章节进行定义。汽车以太网技术的推广将成为 WAVE 普及的最佳载体,在智能交通领域,V2X 也将为 WAVE 技术提供重要应用场景。
2.2.4 可扩展性强
以太网的可持续更新及兼容扩展技术,是其能在互联网技术的发展中永葆生机关键因素之一。在完成标准以太网(10Mbps)、快速以太网(100Mbps)和千兆以太网(1000 Mbps)演进和迭代后,以太网还在不断的自我更新扩展;它不但完成了持续性带宽扩容,还维持了对原有协议的兼容性。将以太网技术运用到汽车领域,引入的是一种稳定的高带宽通信技术,更给汽车带来了一种对潜在场景的扩展能力。
2.3 汽车以太网的发展趋势
2.3.1 汽车以太网技术的应用
作为一种新的汽车网络技术,汽车以太网在汽车的搭载普及不是一蹴而就的,它不会在短周期内完全代替现有车载网络技术。在进入汽车领域后,车载以太网技术更多的是先从部分子系统慢慢融合,并最终推进汽车网络架构的演进过程。如图 2,当前可预期的车载以太网技术的运用可归纳成如下阶段:
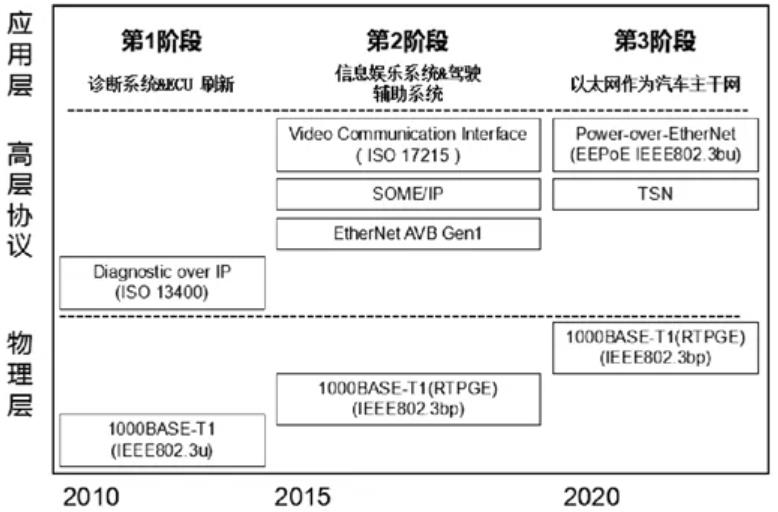
图 2 汽车以太网技术应用发展路线
第一阶段,面向汽车诊断功能(OBD)和 ECU 软件更新的 DOIP 协议的推广运用。以 ECU 软件更新为例,相对于传统基于 CAN 的刷新(1Mbps),刷写带宽可提高 100 倍,此举将显著提高汽车诊断和软件更新时效性,降低生产和服务成本。
第二阶段,面向智能座舱和智能辅助驾驶功能的推广使用,由于 BroadR-Reach 技术不断完善,产业氛围的形成。基于 SOME/IP、AVB 等协议,车载以太网技术会以独立的节点或小范围内子系统的形式实现量产,如使用高清以太网摄像头的环视泊车系统,基于以太网传输的多屏互动的高清智能座舱系统等。
第三阶段,上述阶段更多的是聚焦于个别指定的子系统, 基于的前两个阶段的积累,将开启以太网为汽车主干网络, 集成动力总成、底盘控制、车身控制、数字座舱等,形成一个跨域汽车以太网网络,并逐步引入 TSN,Giga Mbps 超高速汽车以太网等技术。
2.3.2 基于域控制器的混合汽车网络拓扑
汽车电子电器网络架构演进方向预示着以太网将替代CAN 成为高速主干网,基于域控制器(Domain Controller) 构建的网络拓扑将成为子网系统。如图 3,该拓扑中以太网为主干网络,将车载域控制器系统(车身域、底盘域、动力域、信息娱乐域、辅助驾驶域)进行高速互联。域控制器除了完成专用的控制逻辑外,还将作为子网关实现跨域数据交互功能。面向域控制器的网络拓扑改变传统车辆网络架构中控制器到控制器的点对点交互方式。新架构中,如:车身域内部,各控制器基于 CAN、LIN 总线完成数据交互(类似于传统汽车网络架构),在信息娱乐域中,娱乐域控制器与其子部件的通信将通过以太网实现;如一个域需跨与其他控制器交互信息时则需经由车域网关经以太网路由完成。
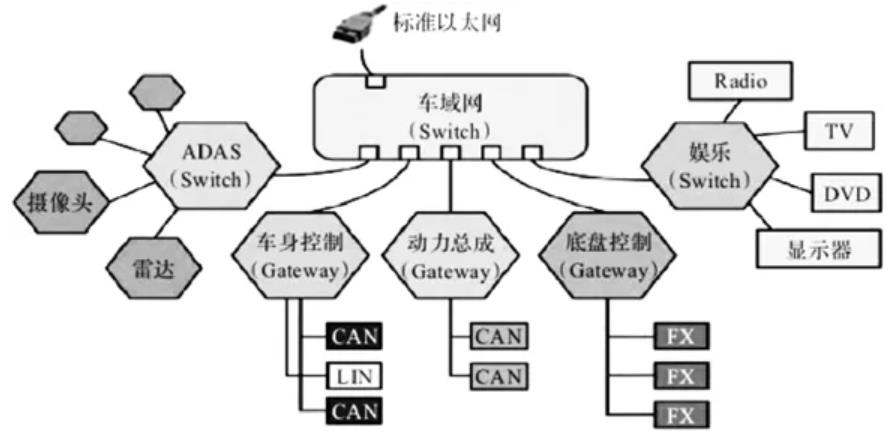
图 3 以太网为主干网的混合汽车网络拓扑示意
2.3.3 汽车以太网带宽扩展
针对不同场景下通讯带宽需求,汽车以太网在100BASE- T1 的基础上进行了扩展,目前汽车以太网已经正式发布的技术标准包括:100Mbps 汽车以太网 IEEE802.3bw(100BASE- T1)、1000Mbps 汽车以太网 IEEE802.3bp(1000BASE-T1)、 10Mbps 汽车以太网 IEEE802.3cg(10BASE-T1S:10Mbps Single Pair Ethernet)和 Giga Mbps 级汽车以太网 IEEE802.3ch(Multi-Gig Automotive Ethernet)等。
值得注意的是与百兆汽车以太网和千兆快速以太网相比,10M 汽车以太网采用了总线型的拓扑结构,如图 4 所示, 该拓扑可支持 25m 总线传输。10M 汽车以太网的以上特性,可应用于动力系统、底盘系统、车身系统、音频系统、超声波雷达等大部分车辆功能系统。未来技术成熟后,有可能会替代现有的车辆 CAN 总线系统。

图 4 10M 以太网总线式拓扑示意图
3 汽车以太网技术的挑战
虽然在汽车以太网标准制定方面有 OPEN ALLIANCE、IEEE、AVNU、AUTOSAR 等组织积极推动,但是各类规范、标准的丰富和量产落地还需一些时日;虽然博通、恩智浦、马威尔等车载芯片供应商对汽车以太网维持着高增长的研发投入,但是相对于传统 CAN/LIN 通讯技术,目前市场上其他各类配套开发、测试技术还处于初级阶段。[8][9]因此,当前技术标准的完整体系构建、配套产业供应链的形成是车载以太网推广普及重要挑战。此外,随着汽车以太网的引入,全新的汽车网络拓扑,更为丰富的应用场景将给汽车带来新的信息安全考验,相关应对策略也值得汽车行业从业者进一步思考。
4 总结
汽车智能网联化大浪已经来临,ADAS 技术的快速革新、高品质数字座舱、OTA 远程升级、5G 通讯技术等的运用推进着车载网络带宽需求的爆发式增长。拥有高带宽的汽车以太网能很好的满足上述需求,且针对未来更高性能需求,其可扩展支持超高 Giga 比特带宽,超低时延 TSN 时间敏感型以太网技术等。显然,汽车以太网将成为构建新一代汽车高速通信网络架构的基石,相对于上世纪末 CAN 通讯技术给汽车工业带来的变革,它将更具革命性。当然,汽车以太网技术的发展也面临着行业配套发展刚起步、新的信息安全风险等众多挑战,让我们一起期待汽车以太网技术的发展。
参考文献
[1]李海宁.基于 Ethernet AVB 的汽车混合网络的分析与设计[D].重庆邮电大学,2016.
[2]孟祥坤,张起朋,张宏伟.车载以太网技术发展与测试方法研究[J].汽车电器,2019,(05):40-44.
[3]孟超.基于以太骨干网的域集中式网络架构设计与验证[D].吉林大学,2018.
[4]吴晨晓.汽车网络通信总线现状及发展[J].汽车实用技术,2019, (02):203-204.
[5]提芳.车载时间敏感网络流预留协议研究[D].导师:陈晨.西安电子科技大学,2018.
[6]杨光,潘俊家,崔根群,安康,朱永健.车载以太网TCP/IP 协议一致性测试系统研究[J].现代电子技术,2020,43(07):29-33+38.
[7]李志涛.车载以太网系统测试的研究与分析[J].汽车电器,2019, (10):9-12.
[8]王鑫,田丽媛.车载以太网技术发展与测试方法研究[J].网络安全技术与应用,2019,(10):116-117.
[9]董明,张久庆,潘欢,杨尚咏,刘荣涛.车载以太网网关的设计和应用[J].中国集成电路,2019,28(06):55-59.
来源:智能汽车开发者平台 本文由涂孝军,张莹,李晓平联合创作






